







PD16C topeltlauaga mobiilne CNC-plaatide puurmasin




| Ese | Parameetri nimi | Parameetri väärtus |
| Plaatsuurus | Plaatkattuvuse paksus | Maks. 80 mm |
| Laius * pikkus | 1000 mm × 1650 mm 1 tükk | |
| 825 mm × 1000 mm 2-osaline | ||
| 500 mm × 825 mm 3-osaline | ||
| Puuri läbimõõt | Φ12mm–Φ50mm | |
| Muutuva kiiruse meetod | Inverteri astmevaba kiiruse muutmine | |
| Pöörlemiskiirus()Pöörlemiskiirus) | 120-560 p/min | |
| Sööda töötlemine | Hüdrauliline astmevaba kiiruse reguleerimine | |
| Plaatkinnitus | Kinnituspaksus | 15-80 mm |
| Kinnitussilindrite arv | 12个 | |
| Kinnitusjõud | 7,5 kN | |
| Mootor | Spindli mootor | 5,5 kW |
| Hüdraulilise pumba mootor | 2,2 kW | |
| Laastukonveieri mootor | 0,4 kW | |
| Jahutuspumba mootor | 0,25 kW | |
| X-telje servomootor | 1,5 kW | |
| Y-telje servomootor | 1,0 kW | |
| Masina suurus | Pikkus*laius*kõrgust | umbes 3160*3900*2780 mm |
| Wight | Masin | umbes 4000 kg |
| Laastueemaldussüsteem | umbes 400 kg | |
| Insult | X-telg | 1650 mm |
| Y-telg | 1000 mm |
1. See masin koosneb peamiselt voodist, portaalist, üleviimislauast (topeltlaud), puurpeast, hüdrosüsteemist, juhtimissüsteemist, tsentraliseeritud määrimissüsteemist, kiibi eemaldamise süsteemist, jahutussüsteemist, kiirvahetuspadrunist jne.
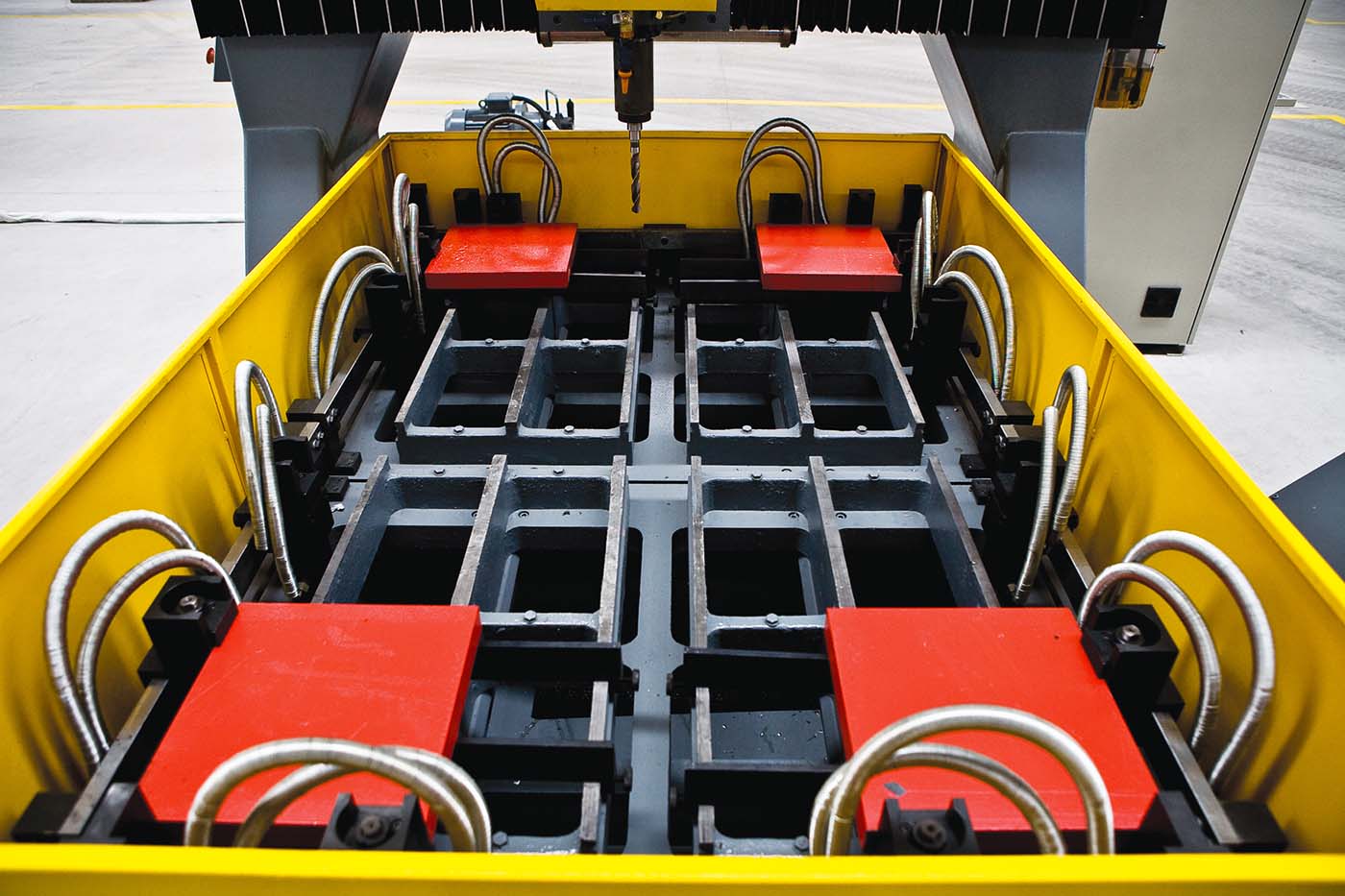
2. See masin on valmistatud fikseeritud voodi ja liikuva portaalkonstruktsiooni kujul. Portaal, voodi ja töölaud on kõik keevitatud konstruktsioonidega ning pärast vananemistöötlust on täpsus stabiilne. Plaat on kinnitatud hüdrauliliste klambritega ja operaatorit juhitakse jalglülitiga, mis on mugav ja tööjõudu säästev;


3. Sellel masinal on kaks CNC-telge: portaalplatvormi liikumine (x-telg); puurmasina pea liikumine portaalplatvormil (y-telg). Iga CNC-telge juhib täpne lineaarne rulljuhik, mida juhitakse otse vahelduvvoolu servomootori ja kuulkruvi abil. Paindlik liikumine ja täpne positsioneerimine.
4. Hüdrauliline automaatjuhtimisega puurpea on meie ettevõtte patenteeritud tehnoloogia. Enne kasutamist ei ole vaja parameetreid seadistada ning kiire edasiliikumise, edasiliikumise ja kiire tagasiliikumise vaheline üleminek toimub automaatselt elektrohüdraulilise kombineeritud toime abil.
5. See tööpink kasutab käsitsi juhtimise asemel tsentraliseeritud määrimissüsteemi, et tagada funktsionaalsete osade hea määrimine, parandada tööpinki jõudlust ja pikendada selle kasutusiga.
6. Juhtimisprogramm võtab kasutusele ülemise arvutiprogrammeerimistarkvara, mis sobib meie ettevõtte poolt iseseisvalt väljatöötatud programmeeritava kontrolleriga.



Ettevõtte lühiprofiil  Tehase teave
Tehase teave  Aastane tootmisvõimsus
Aastane tootmisvõimsus  Kaubandusvõime
Kaubandusvõime 





